Product Information ?
WEB Catalog
? Vacuum Equipment (Vacuum Generators/Vacuum Suction Cups/Other)
? Gripper for Collaborative Robots
WEB Catalog
Product List
- Air Management System
-
Directional Control Valves
- Pilot Operated 4/5 Port Solenoid Valves
- Pilot Operated 3 Port Solenoid Valves
- Direct Operated 3/4/5 Port Solenoid Valves
- Reduced-wiring Fieldbus System (Serial Transmission System)
- Wireless System
- Air Operated Valves
- Mechanical Valves/Transmitters
- Finger Valve/Hand Valves/Residual Relief 3 Port Valve
- Blow Guns
- Power Valves
- ISO Valves
- Explosion-Proof Valves
- Pilot Operated 4/5 Port Solenoid Valves
-
Air Cylinders
- Standard Air Cylinders (Round Type)
- Standard Air Cylinders (Square Cover)
- Compact Air Cylinders
- Environment Resistant Cylinders
- Floating Joints/Rod End
- Air-hydro Units
- Mechanically Jointed Rodless Cylinders
- Magnetically Coupled Rodless Cylinders
- Table Cylinders
- Guide Cylinders
- Dual Rod Cylinders
- Lock Cylinders/Cylinder with An End Lock
- Fine Lock Cylinders
- Specialty Cylinders
- Clamp Cylinders
- Pin Shift Cylinder
- Stopper Cylinders
- Stroke Reading Cylinders
- Valve Mounted Air Cylinders
- ISO Cylinders: ISO Standards (6432)
- ISO Cylinders: ISO Standards (15552)
- ISO Cylinders: ISO Standards (21287)
- ISO Cylinders
- Shock Absorbers
- Auto Switches
- Wireless Auto Switches
- Actuator Position Sensor
- Flow Control Equipment
- Standard Air Cylinders (Round Type)
- Rotary Actuators/Air Grippers
-
Electric Actuators/Cylinders
- e-Actuator
- Manifold Controller/Manifold Controller Compatible Electric Actuator
- Battery-less Absolute Encoder Type
- Slider Type
- Rod Type/Guide Rod Type
- Slide Tables
- Miniature
- Rotary Tables
- Grippers
- Grippers for Collaborative Robots
- Controllers/Drivers
- Environment
- Motorless Type
- Electric Cylinders
- Card Motor
- Made to Order
- e-Actuator
-
Vacuum Equipment (Vacuum Generators/Vacuum Suction Cups/Other)
- Vacuum Ejectors (Vacuum Generators)/Vacuum Pump Systems
- Vacuum Ejectors
- Vacuum Gripper System (Foam Type)
- Vacuum Release Valve Units
- Air Suction Filters
- Vacuum Pads (Vacuum Suction Cups)
- Special Pads
- Gripper for Collaborative Robots
- Vacuum Saving Valves
- Magnet Buffer
- Vacuum Flow
- Vacuum Regulators
- Related Equipment for Vacuum Systems
- Vacuum Ejectors (Vacuum Generators)/Vacuum Pump Systems
- Grippers for Collaborative Robots
- Compact Compressor
- Air Preparation Equipment
- Modular F.R.L./Pressure Control Equipment
- Modular F.R.L. Units
- Pressure Control Equipment
- Booster Regulators
- Lubrication Equipment
- Fittings and Tubing
- Gas Generator
- Flow Control Equipment
- Silencers/Exhaust Cleaners/Pressure Gauges
-
Switches/Sensors/Controller
- Electronic Pressure Switches/Sensors (Self-contained Type)
- Electronic Pressure Switches/Sensors (Remote Type)
- Mechanical Pressure Switches
- Electronic Flow Switches/Sensors
- Clamp-on Type Flow Sensor
- Mechanical Flow Switches
- Air Management System
- Controllers
- Electronic Temperature & Humidity Switches
- Auto Switches for Air Cylinders
- Auto Switches for Rotary Actuators and Air Grippers
- Position Sensor
- Electronic Pressure Switches/Sensors (Self-contained Type)
- Air Blowing Equipment
-
Static Neutralization Equipment
- Static Neutralization Equipment Ionizer Bar Type
- Static Neutralization Equipment Nozzle Type Ionizer
- Static Neutralization Equipment Fan Type Ionizer
- Static Neutralization Equipment Ionizer Gun
- Static Neutralization Equipment Desktop Duster Box
- Static Neutralization Equipment Electrostatic Sensor/Sensor Monitor/Meter
- Static Neutralization Equipment/Ionizers
- Static Neutralization Equipment Ionizer Bar Type
-
Industrial Device Communication Equipment/Wireless System
- Wireless System: PROFINET Compatible Products
- Wireless System: EtherNet/IP Compatible Products
- Wireless System: EtherCAT Compatible Products
- Wireless System: IO-Link Compatible Products
- Wireless System: CC-Link Compatible Products
- Wireless System: DeviceNet Compatible Products
- Industrial Device Communication Equipment: PROFINET Compatible Products
- Industrial Device Communication Equipment: EtherNet/IP Compatible Products
- Industrial Device Communication Equipment: EtherCAT Compatible Products
- Industrial Device Communication Equipment: Modbus TCP Compatible Products
- Industrial Device Communication Equipment: ETHERNET POWERLINK Compatible Products
- Industrial Device Communication Equipment: CC-Link IE Field Compatible Products
- Industrial Device Communication Equipment: SSCNET III Compatible Products
- Industrial Device Communication Equipment: MECHATROLINK-Ⅲ Compatible Products
- Industrial Device Communication Equipment: PROFIsafe Compatible Products
- Industrial Device Communication Equipment: IO-Link Compatible Products
- Industrial Device Communication Equipment: PROFIBUS Compatible Products
- Industrial Device Communication Equipment: DeviceNet Compatible Products
- Industrial Device Communication Equipment: CC-Link Compatible Products
- Industrial Device Communication Equipment: AS-interface Compatible Products
- Industrial Device Communication Equipment: CompoNet Compatible Products
- Industrial Device Communication Equipment: Interbus Compatible Products
- Industrial Device Communication Equipment: MECHATROLINK-Ⅱ Compatible Products
- Other: RS232C Compatible Products
- Other: RS485 Compatible Products
- Wireless System: PROFINET Compatible Products
- Process Valves
- Chemical Liquid Valves/Fittings & Needle Valves/Tubing
- Process Pumps(Diaphragm Pumps)
-
Temperature Control Equipment
- Thermo-Chillers (Circulating Fluid Temperature Controllers) Standard Type/Basic Type
- Thermo-Chillers (Circulating Fluid Temperature Controllers) Inverter Type
- Thermo-Chillers (Circulating Fluid Temperature Controllers) Dual Channel Thermo chiller for Lasers
- Thermo-Chillers (Circulating Fluid Temperature Controllers) Rack Mount Type
- Thermo-Chillers (Circulating Fluid Temperature Controllers) High performance/Type & Inverter Type
- Chiller Compliant Regulations
- Thermo-cons/Thermoelectric Baths (Peltier-Type Temperature Control Equipment)
- Air Temperature Controllers
- Thermo-Chillers (Circulating Fluid Temperature Controllers) Standard Type/Basic Type
- Process Gas Equipment AP Tech
- High Vacuum Equipment
- Industrial Filters/Sintered Metal Elements
- Pneumatic Instrumentation Equipment
- Hydraulic Equipment
Theme
-
Clean Series/Low-Particle Generation
- Directional Control Valves
- Air Cylinders
- Rotary Actuators
- Air Grippers
- Air Dryers
- Compressed Air Cleaning Filter Series
- Clean Gas Filters/Air Filters
- Exhaust Cleaner for Clean Room/Clean Exhaust Filter
- Modular F.R./Pressure Control Equipment
- Fittings
- Tubing
- Flow Control Equipment
- Switches/Sensors
- Flow Switch
- Electric Actuators
- Directional Control Valves
- Fluoropolymer Equipment/PVC Equipment
-
Series Compatible with Secondary Batteries Series 25A-
- Air Management System
- Directional Control Valves
- Actuators
- Related Products
- Rotary Actuators/Air Grippers
- Vacuum Equipment
- Air Preparation Equipment/Clean Air Filters
- ModularF.R.L./Pressure Control Equipment
- Flow Control Equipment/Fittings
- Tubings
- Detection Switches/Auto Switches
- Static Neutralization Equipment/Ionizers
- Process Valves
- Process Gas Equipment
- Electric Actuators
- Air Management System
- Copper, Fluorine-free Equipment Series 20-
- ISO Products
- Arc Welding Process Equipment
- IO-Link Compatible Products
- Grease-free Nitrogen (N2) Compatible Equipment
- List of ATEX Compliant Products
- Explosion-Proof Valves Certified Products
- Equipment for the Food Manufacturing Industry
Gripper for Collaborative Robots
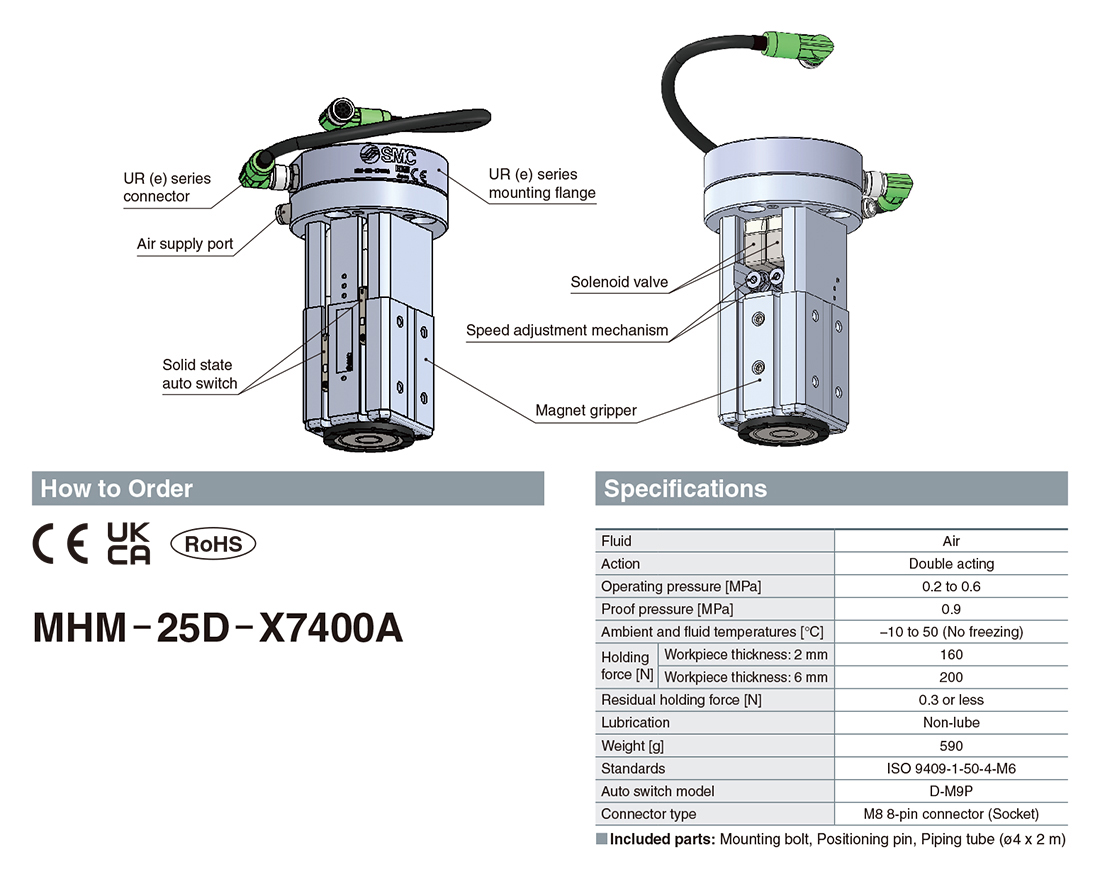
Magnet Gripper for Collaborative Robots MHM-X7400A
for Universal Robots

-
?Plug and Play configuration for immediate use
?URCap: Easy programming
?Attracts and holds heavy objects with a magnet
?Supports workpieces with holes and uneven surfaces
?Compact with high holding force
Holding force: Max. 200 N (?25, Workpiece thickness 6 mm)
?Continues to hold workpieces even when the air is shut off
?Operate by simply connecting 1 air supply tube and an electrical wiring M8 connector.
?Integrated solenoid valve, auto switch, and piston speed adjustment mechanism
Magnet Gripper for Collaborative Robots MHM-X7400A
for Universal RobotsManual
Series View search result MHM-X7400A View search result
| Series | Max. holding force N (Workpiece thickness mm) |
|---|---|
| MHM-X7400A | 160(2) 200(6) |
Features
Magnet Gripper for Collaborative Robots

Attracts and holds heavy objects with a magnet
Supports workpieces with holes and uneven surfaces
Compact with high holding force: Max. 200 N (o25, Workpiece thickness 6 mm)
Continues to hold workpieces even when the air is shut off
Operate by simply connecting 1 air supply tube and an electrical wiring M8 connector.
Integrated solenoid valve, auto switch, and piston speed adjustment mechanism
URCap
Component Parts
Characteristics
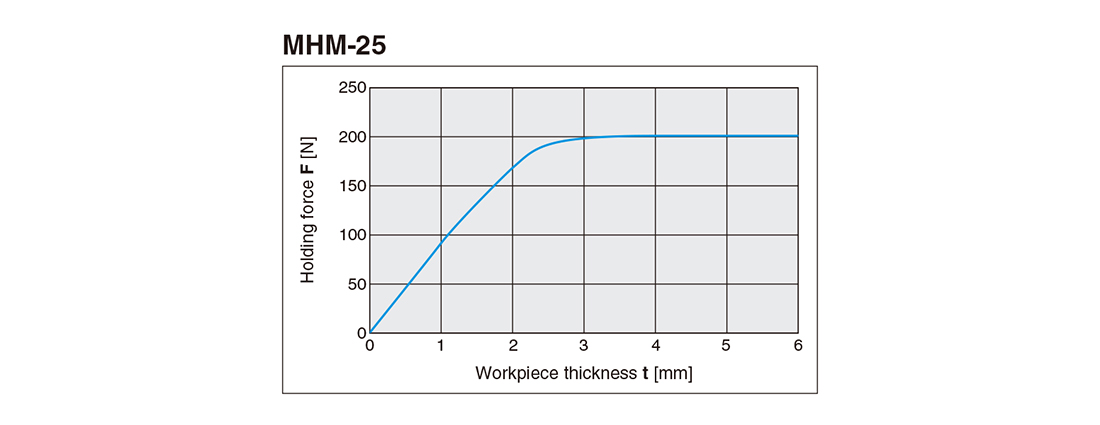
Holding force
The holding force graph shows the theoretical value for low-carbon steel plates.
Holding forces vary depending on the material and shape of the workpiece. Please perform a holding test while referring to the value selected based on the graph.
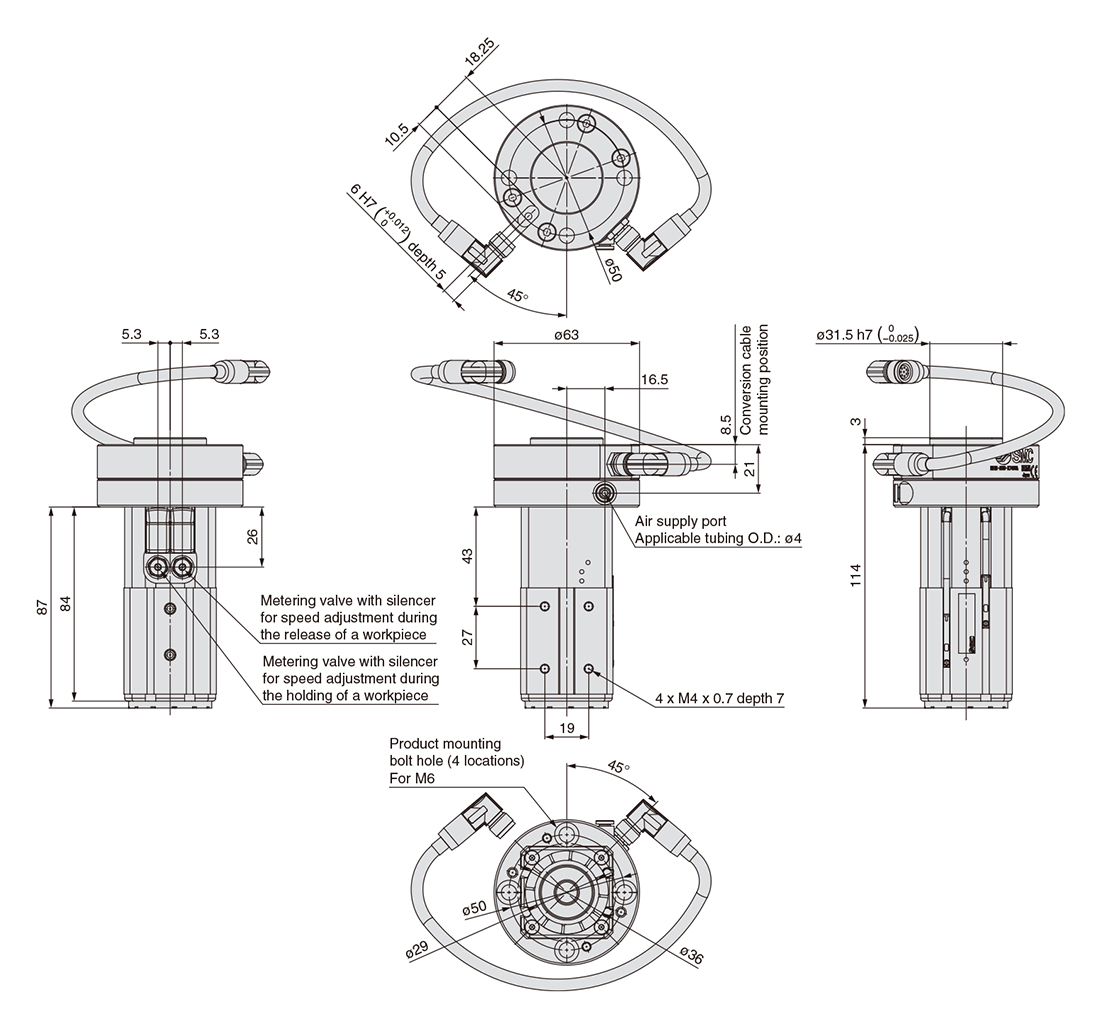
Dimensions
URCap
Easy programming
By using the dedicated software certified for Universal Robots, URCap, the teaching pendant can conduct various operations intuitively, allowing for sensor signals to be easily incorporated.
Save a copy of the URCap software to a USB memory and insert it into the teaching pendant to easily install the software.
? Please download the URCap software from the website, and save it to a USB memory.


